
Become a member
Take advantage of exclusive member benefits, world class events, networking and specialist support

 Become a member
Become a member 
Is 3D Machine Vision Right for Me?
3D machine vision is a powerful technology capable of providing more accuracy for specific localisation, recognition, and inspection tasks that traditional 2D machine vision systems tend not to reliably succeed at. It offers an alternative set of technologies to 2D vision that can solve – with great accuracy – the complex issues that 2D systems cannot beat.
3D systems are intrinsically more complicated than 2D systems, not to mention less budget-friendly. But looking past the price tag and setup, you will find a system that can achieve far more powerful results than any 2D camera.
3D machine vision can be useful for applications that require more accuracy of the size, texture, and depth of the object in question, like agriculture, manufacturing, inspection, and quality control. These can all benefit from 3D vision, but deciding between 3D technologies will ultimately depend on the level of accuracy required, speed of measurement, whether your object is fixed or moving, and the illumination properties of your object and its environment.
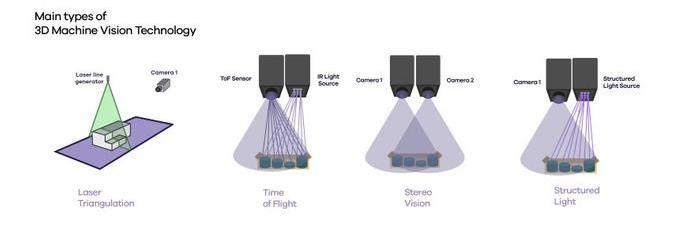
There are 4 main forms of 3D imaging technology used in machine vision systems: Stereo Vision, Time of Flight (ToF), Laser Triangulation (3D Profiling), and Structured Light.
Stereo vision utilises two or more 2D cameras calibrated and focused on the same object. They can provide full FoV 3D measurements in dynamic environments based on triangulation of rays from multiple perspectives.
Laser triangulation, alternatively, measures the alteration of a laser beam projected onto an object using a camera perpendicular to the beam. This approach does require continuous linear motion, such as with a conveyor belt, but provides a very high level of accuracy of imaging.
Time of Flight (ToF) measures the time it takes for light from a modulated IR illumination source to reach the object and return to the ToF sensor, which then generates a point cloud based on these measurements.
Combining a 2D machine vision camera with imaging library software is proven strategy. However, changes in illumination can have adverse effects on accuracy when taking measurements. Too much light can create an overexposed shot, leading to light bleeding or blurred edges of the object, and insufficient illumination can adversely affect the clarity of edges and features that appear on a 2D image.
In applications where illumination cannot be easily controlled, and therefore cannot be altered to fix the shot, 2D machine vision systems can struggle to generate reliable images.
3D machine vision cameras can solve these problems by recording accurate depth information. Point clouds and depth maps, two types of 3D images, come with highly accurate, useful data. Every pixel of the object is accounted for in space, and the user is provided with X, Y and Z plane data as well as the corresponding rotational data for each of the axes.
This makes 3D machine vision an exceptional option compared to 2D in the context of applications involving dimensioning, space management, thickness measurement, Z-axis surface detection and quality control involving depth. Traditional 2D image processing can still be used with the collected images, creating an implementable solution to many machine vision problems.
For more on 3D Machine Vision.
